What are you looking for?
AD1012A Radar Scene Emulator

Validate radar autonomous driving functions in the lab with full-scene emulation
Starting from
Highlights
Test Radar-based Autonomous Driving Features with the Radar Scene Emulator
Achieving the next level in vehicle autonomy demands robust algorithms trained to interpret radar reflections detected by automotive radar sensors. Keysight’s first-to-market technology combines hundreds of miniature radar target simulators into a scalable screen that can emulate objects with up to 512-pixel resolution and at distances as close as 1.5 meters. This breakthrough radar scene emulation solution overcomes conventional radar sensor test solutions that have a limited field-of-view (FOV) and cannot simulate objects at distances less than 4 meters.
Utilizing “total scene generation”, the radar scene emulation solution exercises your automated drive systems and algorithms by applying time-synchronized inputs to the actual sensors. Its open architecture also closes the loop with your existing hardware-in-the-loop (HIL) systems and 3D modelers. These capabilities create a solution that complements—and fills the gap between—software simulation and on-road testing. As such, it overcomes limitations of software simulation that does not test real radar sensor response, while achieving repeatable testing of radar scenes, which cannot be done on the test track.
The Radar Scene Emulator allows you to emulate real-world driving scenarios, varying speed, distance, and number of targets, across a contiguous FOV. With radar sensors and back-end software confidently tested against the complexity of real-world driving scenarios, you’ll achieve your vision of ADAS and next-generation vehicle autonomy sooner, with less risk.
In-lab full radar scene emulation
- Thoroughly exercise radar sensors and systems with up to 512-pixel resolution a contiguous horizontal FOV of ±70 degrees and vertical ±15 degrees
- Supports short, medium, and long-range mmWave radars by generating static and dynamic targets at ranges of 1.5 meters to 300 meters and with velocities of 0 to 400 km/h
- Address multi-target, multi-angle scenarios with mechanically fixed RF Front ends that provide repeatable angle of arrival (AoA) accuracy
- Emulate complex, RF-dense urban scenes with realistic interference testing
- Using 3D point clouds and multiple reflections allows for improved detection and differentiation of objects
The Technology Behind Radar Scene Emulator
Innovative technologies brought the Radar Scene Emulator to life. Hear from the automotive testing experts at Keysight Labs and our partner IPG Automotive on what made these breakthroughs possible, how the technology works, and how it has rapidly evolved from supporting 20 to 40+ to 512 radar objects.
We invite the automotive test community to be part of an exciting technology launch for our all-new Keysight AD1012A radar scene emulator.
Keysight’s first-to-market radar scene emulator technology helps you develop robust advanced driver-assistance system (ADAS) radar sensors and algorithms needed to achieve full vehicle autonomy.
Attend Keysight's radar scene emulator virtual launch to learn more!
In this demo, you will learn how the Radar Scene Emulator sharpens your ADAS radar vision with full-scene emulation by allowing you to:
- Test with a wide field-of-view (FOV) of + / -70° to view both near and far targets.
- Apply test scenarios with variable environmental conditions, traffic density, speed, distance, and total number of targets.
- Accelerate ADAS / AV algorithm training, and test scenarios earlier with complex repeatable scenes.
Also hear from IPG about how their simulation technology works with Keysight’s Radar Scene Emulator to enable an innovative method for training ADAS and AV algorithms.




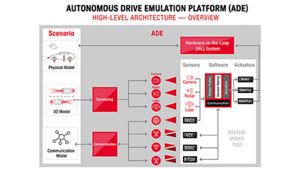
In this demo, you will see how our radar scene emulation technology is at the heart of the Keysight autonomous drive emulation platform. Learn how:
- Keysight's innovative miniaturized radar target simulators shift the test paradigm from object detection to traffic scene emulation.
- The Radar Scene Emulator, wireless non-line-of-sight sensors, and the time synchronization software work together for in-lab testing.
- The hardware-in-the-loop (HIL) system emulates synchronized connections to all relevant in-vehicle ADAS sensors.
Validate Automotive Radar Perception Algorithms
Validating how automotive radar sensors perceive dynamic targets is crucial to radar’s contribution to ADAS / AD functionality.. Developers must test the radar modules and the algorithms behind safety and automated driving applications against sensor front-end variants, bumper designs, and mounting positions. In this webinar by ADAS and AD expert Sven Leitsch, he takes us through a study on pedestrian perception model creation, testing, and ground-truth validation using the unique Keysight Radar Scene Emulator.
Keysight Radar Scene Emulator Honored with Awards®
- AutoSens Awards 2022 – Silver Winner: Best Validation/Simulation Tool
- The Electronics Industry Awards 2022: Automotive Product of the Year – Highly Commended


Extend the Capabilities of Your Radar Scene Emulator
Rev Up Your Knowledge On Radar Scene Emulation




















Related Keysight Autonomous Drive Solutions





Want help or have questions?