Accelerating lidar sensor verification using target simulation
Testing lidar sensors requires characterizing many parameters, including the reflectivity and the maximum sensor range, all within the lidar field-of-view (FOV). To properly assess long-range lidar, it is crucial to perform outdoor testing using physical target boards that expose them to real-world conditions. Automotive lidar sensors must meet stringent requirements and guidelines to qualify for certification during the development and manufacturing phases to ensure functional safety.
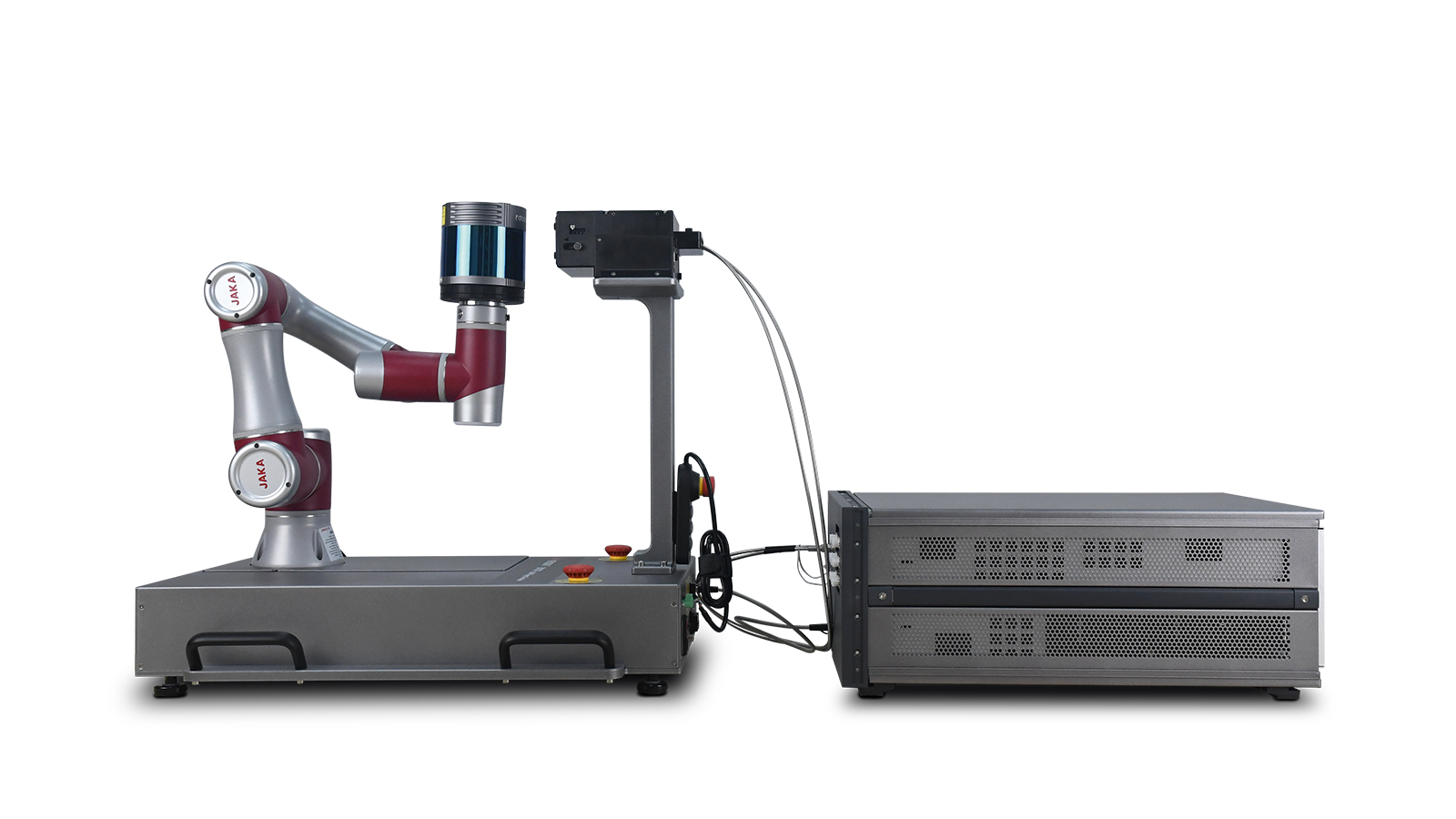
Verifying lidar sensors requires target simulation with multiple distance and reflectivity values, not limited by fixed values of target boards. The test setup base unit receives the lidar sensor signal via a remote optical head, adds delay and attenuation to simulate the desired distance and reflectivity, then returns the signal to the sensor. A cobot is necessary to position the lidar sensor and cover the FOV. The test setup should be compact, preferably a bench-type setup, keeping space usage minimal while maximizing the test coverage.
Lidar target simulation solution
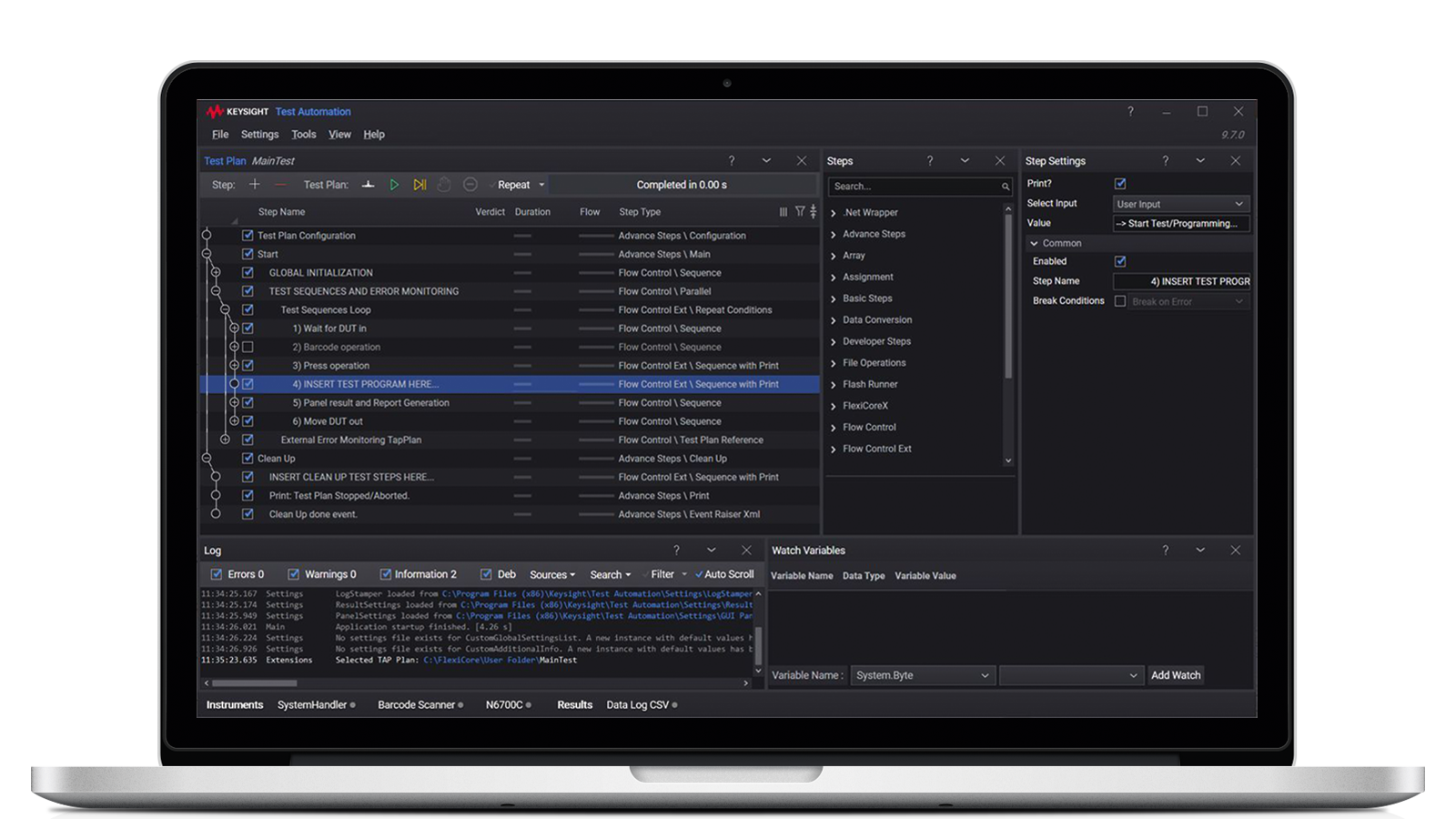
Verifying automotive lidar sensors requires testing the sensors for range accuracy, azimuth and elevation angle accuracy, and field-of-view. With a compact and standardized bench setup, the Keysight lidar target simulation solution simulates test target distances from 3 to 300 meters and surface reflectivity from 10 to 94%. The solution simplifies and accelerates the testing, validation, and production of automotive lidar sensors through standardization and automation covered by Keysight test executive automation software for manufacturing.
E8717A Lidar Target Simulator — Distance, Reflectivity, 3D Objects
Simulate targets with both distance and reflectivity in a compact bench setup, with advance features and analytical software to gain insights into lidar sensor performance.